pthread.h
线程又被称为轻量级进程(Lightweight Process,LWP)
与进程相比:
- 优点:线程具有开销小、数据通信与共享数据方便,并能在一定程度上提高程序并发性
- 不足:因为线程使用的是库函数,所以不够稳定
头文件
#include <pthread.h>pthread_create
创建线程
/**
* 参数
* thread 待创建线程的线程id指针,这是一个传出参数,若需要对该线程进行操作,应使用一个pthread_t类型的变量获取该参数;
* attr用于设置待创建线程的属性,通常传入NULL,表示使用线程的默认属性;
* start_toutinue是一个函数指针,指向一个参数为void、返回值也为void*的函数,该函数为待创建线程的执行函数,线程创建成功后将会执行该函数中的代码;
* arg为要传给线程执行函数的参数
*
* 返回
* 成功,会返回0
* 失败,则直接返回errno
*/
int pthread_create(
pthread_t *thread,
const pthread_attr_t *attr,
void *(*start_routine) (void *),
void *arg
);注意,由于 errno 的值很容易被修改,线程中很少使用 errno 来存储错误码,也不会使用 perror()直接将其打印,而是使用自定义变量接收 errno,再调用 strerror()将获取到的错误码转换成错误信息,最后才打印错误信息。
pthread_self
获取线程 id
pthread_t pthread_self(void);进程 id 的类型 pid_t 实质是一个正整数,在整个系统中都是唯一的,但线程 id 只在当前进程中保证唯一,其类型 pthread_t 并非是一个正整数,且当前进程调用 pthread_create()后获取到的 thread 为新线程 id
示例
#include <pthread.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
void *run_task(void *arg)
{
printf("run_task pid: %d, tid: %lu\n", getpid(), pthread_self());
}
int main(int argc, char const *argv[])
{
pthread_t tid;
printf("main pid: %d, tid: %lu\n", getpid(), pthread_self());
int result = pthread_create(&tid, NULL, run_task, NULL);
if (result != 0)
{
printf("Error creating thread: %s\n", strerror(result));
exit(EXIT_FAILURE);
}
result = pthread_join(tid, NULL);
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
main pid: 72381, tid: 140704458284992
run_task pid: 72381, tid: 123145437802496pthread_exit
线程退出
/**
* 参数
* retval表示线程的退出状态,通常设置为NULL
* 没有返回值
*/
void pthread_exit(void *retval);区别
- return 用于退出函数,使函数返回函数调用处;
- exit() 用于退出进程
- pthread_exit 用于单个线程退出
示例
#include <pthread.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
void *run_task(void *arg)
{
printf("pthread_exit before\n");
pthread_exit(NULL);
printf("pthread_exit after\n"); // This line will not be executed
return NULL;
}
int main(int argc, char const *argv[])
{
pthread_t tid;
int result = pthread_create(&tid, NULL, run_task, NULL);
if (result != 0)
{
printf("Error creating thread: %s\n", strerror(result));
exit(EXIT_FAILURE);
}
result = pthread_join(tid, NULL);
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
pthread_exit beforepthread_cancel
线程终止,使用该函数可以通过向指定线程发送 CANCEL 信号,使一个线程强行杀死另外一个线程
/**
* 参数
* thread为线程id,
*
* 返回
* 成功则返回0,否则返回errno
*/
int pthread_cancel(pthread_t thread);区别
- pthread_exit()使线程主动退出
- pthread_cancel()通过信号使线程被动退出,尽量避免使用
与进程不同的是,调用 pthread_cancel()函数杀死线程时,需要等待线程到达某个取消点,线程才会成功被终止
示例
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <stdlib.h>
void *tfn(void *arg)
{
while (1)
{
printf("child thread...\n");
pthread_testcancel(); // 设置取消点
}
}
int main(void)
{
pthread_t tid;
void *tret = NULL;
pthread_create(&tid, NULL, tfn, NULL);
sleep(1);
pthread_cancel(tid);
pthread_join(tid, &tret);
printf("child thread exit code = %ld\n", (long int)tret);
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
child thread...
child thread...
child thread...
child thread...
child thread...
child thread...
child thread...
child thread exit code = 1pthread_join
线程挂起
/**
* 参数
* pthread表示被等待的线程id
* retval用于接收thread线程执行函数的返回值指针
* 成功将返回0,否则返回errno
*/
int pthread_join(pthread_t thread, void **retval);retval 指针的值与 thread 线程的终止方式有关:
若 thread 线程通过 return 返回,retval 所指的存储单元中存放的是 thread 线程函数的返回值;
若 thread 线程被其它线程通过系统调用 pthread_cancel()异常终止,retval 所指向的存储单元中存放的是常量 PTHREAD_CANCELED;
若 thread 线程通过自调用 pthread_exit()终止,retval 所指向的存储单元中存放的是 pthread_exit()中的参数 ret_val;
此外,若等待 thread 的线程不关心它的终止状态,可以将 retval 的值设置为 NULL。
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <stdlib.h>
void *task(void *arg)
{
int *ret = malloc(sizeof(int));
*ret = 100; // 设置线程返回值
pthread_exit((void *)ret); // 线程终止
return NULL; // 线程返回
}
int main(void)
{
pthread_t tid;
int *retval;
pthread_create(&tid, NULL, task, NULL);
// 调用pthread_join可以获取线程的退出状态
pthread_join(tid, (void **)&retval);
printf("retval: %d\n", *retval);
free(retval); // 释放线程返回值的内存
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
retval: 100pthread_detach
将线程从主控线程中分离,如此,当线程结束后,它的退出状态不由其它线程获取,而是由该线程自身自动释放。
/**
* 参数
* thread为待分离线程的id
*
* 返回
* 成功则返回0
* 失败返回errno
*/
int pthread_detach(pthread_t thread);注意,pthread_join()不能终止已处于 death 状态的线程,若对处于分离态的线程调用 pthread_join()函数,函数将会调用失败并返回 EINVAL。
示例
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <stdlib.h>
#include <string.h>
void *tfn(void *arg)
{
int n = 5;
while (n--)
{
printf("pthread tfn n = %d\n", n);
sleep(1);
}
return (void *)7;
}
int main(void)
{
pthread_t tid;
void *ret;
pthread_create(&tid, NULL, tfn, NULL);
// 分离子线程
pthread_detach(tid);
int retvar = pthread_join(tid, (void **)&ret);
if (retvar != 0)
{
fprintf(stderr, "pthread_join error %s\n", strerror(retvar));
}
else
{
printf("pthread exit with %ld\n", (long int)ret);
}
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
pthread_join error Invalid argument__thread
__thread是 GCC 的扩展关键字,用于定义线程局部存储变量
示例
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
__thread int i = 0;
void *f1(void *arg)
{
i++;
printf("f1 i address %p val %d\n", &i, i);
return NULL;
}
void *f2(void *arg)
{
i += 2;
printf("f2 i address %p val %d\n", &i, i);
return NULL;
}
int main()
{
pthread_t pid1, pid2;
i += 3;
pthread_create(&pid1, NULL, f1, NULL);
pthread_create(&pid2, NULL, f2, NULL);
pthread_join(pid1, NULL);
pthread_join(pid2, NULL);
printf("main i address %p val %d\n", &i, i);
return 0;
}运行结果
% gcc main.c -o main -lpthread && ./main
f2 i address 0x7fb4edf060c0 val 2
f1 i address 0x7fb4ee804080 val 1
main i address 0x7fb4edf05fa0 val 3pthread_attr_t
线程属性 pthread_attr_t,该结构体中成员的值不能直接修改,须使用函数进行相关操作
typedef struct
{
int detachstate; // 线程的分离状态
int schedpolicy; //线程调度策略
struct sched_param schedparam; //线程的调度参数
int inheritsched; //线程的继承性
int scope; //线程的作用域
size_t guardsize; //线程栈末尾的警戒缓冲区大小
int stackaddr_set; //线程栈的设置
void* stackaddr; //线程栈的位置
size_t stacksize; //线程栈的大小
} pthread_attr_t;创建和销毁
/**
* 线程属性attr会被设置为默认值
* 默认情况下线程处于非绑定、非分离状态,并与共享父进程优先级
* 若要使用默认状态,将pthread_create()函数中的参数attr设置为NULL即可
* 初始化线程属性结构体的函数为pthread_attr_init()
* 这个函数必须在pthread_create()之前调用
*/
int pthread_attr_init(pthread_attr_t *attr);
/**
* 线程终止后须通过pthread_attr_destroy()函数销毁属性资源。
*/
int pthread_attr_destroy(pthread_attr_t *attr);调用顺序
pthread_attr_init()
pthread_create()
pthread_join()
pthread_attr_destroy()相关操作
1、线程的分离状态
默认情况下线程处于非分离状态
/**
* 修改线程属性中的分离状态
*/
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate);
/**
* 获取线程的分离状态
*/
int pthread_attr_getdetachstate(pthread_attr_t *attr, int *detachstate);参数 detachstate 设置为
- PTHREAD_CREATE_DETACHED,线程创建后将以分离状态启动
2、线程的调度策略
/**
* 设置线程的调度策略
*/
int pthread_attr_setschedpolicy(pthread_attr_t *attr, int policy);
/**
* 获取线程的调度策略
*/
int pthread_attr_getschedpolicy(pthread_attr_t *attr, int *policy);policy 三种调度策略的含义分别如下:
SCHED_OTHER,分时调度策略(默认值);
SCHED_FIFO,实时调度策略,先到先服务;
SCHED_RR,实时调度策略,按时间片轮询。
其中分时调度策略通过 nice 值和 counter 值决定调度权值,nice 值越小、counter 越大,被调用的概率越高;实时调度策略通过实时优先级决定调度权值,若线程已准备就绪,除非有优先级相同或更高的线程正在运行,否则该线程很快便会执行。
而实时调度策略 SCHED_FIFO 与 SCHED_RR 的不同在于:
- 调度策略为 SCHED_FIFO 的进程一旦获取 cpu 便会一直运行,除非有优先级更高的任务就绪或主动放弃 cpu;
- 调度策略为 SCHED_RR 的进程则根据时间片轮询,若线程占用 cpu 的时间超过一个时间片,该线程就会失去 cpu,并被置于就绪队列队尾,确保与该进程优先级相同且调度策略为 SCHED_FIFO 或 SCHED_RR 能被公平调度。
3、线程的调度参数
/**
* 设置调度参数
*/
int pthread_attr_setschedparam(pthread_attr_t *attr,
const struct sched_param *param);
/**
* 获取调度参数
*/
int pthread_attr_getschedparam(pthread_attr_t *attr,
struct sched_param *param);线程的调度参数是一个 struct sched_param 类型的结构体,该结构体中只有一个成员 sched_priority,该参数是一个整型变量,代表线程的优先级,仅当调度策略为 SCHED_FIFO 或 SCHED_RR 时成员 sched_priority 有效
其中
- 参数 attr 代表线程属性
- 参数 param 代表线程的调度参数,param 中成员 sched_priority 的默认值为 0。
- 若函数调用成功则返回 0,否则返回 errno。
4、线程的继承性
线程的继承性决定线程调度策略属性和线程调度参数的来源,其来源有两个:
- 一是从创建该线程的线程属性中继承
- 二是从该线程属性结构体中获取。
线程的继承性没有默认值,若要使用该属性,必须对其进行设置。
/**
* 设置线程继承性
*/
int pthread_attr_setinheritsched(pthread_attr_t *attr,int inheritsched);
/**
* 获取线程继承性
*/
int pthread_attr_getinheritsched(pthread_attr_t *attr,int *inheritsched);其中
参数 attr 代表线程属性
参数 inheritsched 代表线程的继承性,该参数的常用取值为
- PTHREAD_INHERIT_SCHED:使新线程继承其父线程中的调度策略和调度参数
- PTHREAD_EXPLICIT_SCHED:使用在 attr 属性中显示设置的调度策略和调度参数
若函数调用成功则返回 0,否则返回 errno。
5、线程的作用域
/**
* 设置线程的作用域
*/
int pthread_attr_setscope(pthread_attr_t *attr, int scope);
/**
* 获取线程的作用域
*/
int pthread_attr_getscope(pthread_attr_t *attr, int *scope);其中
参数 attr 代表线程属性;
参数 scope 代表线程的作用域,该参数常用的取值为
- PTHREAD_SCOPE_PROCESS: 在进程中竞争资源
- PTHREAD_SCOPE_SYSTEM: 在系统层级竞争资源。
若函数调用成功则返回 0,否则返回-1。
6、线程的栈空间
线程栈空间大小
/**
* 修改线程栈空间大小
*/
int pthread_attr_setstacksize(pthread_attr_t *attr, size_t stacksize);
/**
* 获取线程栈空间大小
*/
int pthread_attr_getstacksize(pthread_attr_t *attr, size_t *stacksize);其中
- 参数 attr 代表线程属性
- 参数 stacksize 代表栈空间大小。
- 若函数调用成功则返回 0,否则返回 errno。
7、栈地址
/**
* 设置栈地址
*/
int pthread_attr_setstackaddr(pthread_attr_t *attr, void *stackaddr);
/**
* 获取栈地址
*/
int pthread_attr_getstackaddr(pthread_attr_t *attr, void **stackaddr);当改变栈地址属性时,栈警戒区大小通常会被清零。若函数调用成功则返回 0,否则返回 errno。
8、栈末尾警戒区大小
/**
* 设置栈末尾警戒区大小
*/
int pthread_attr_setguardsize(pthread_attr_t *attr, size_t guardsize);
/**
* 获取栈末尾警戒区大小
*/
int pthread_attr_getguardsize(pthread_attr_t *attr, size_t *guardsize);9、栈地址与栈容量
/**
* 设置线程属性中的栈地址与栈容量
*/
int pthread_attr_setstack(pthread_attr_t *attr,
void *stackaddr, size_t stacksize);
/**
* 获取线程属性中的栈地址与栈容量
*/
int pthread_attr_getstack(pthread_attr_t *attr,
void **stackaddr, size_t *stacksize);其中:
- 参数 attr: 线程属性
- 参数 stackaddr: 栈空间地址
- 参数 stacksize: 栈空间容量
- 若函数调用成功则返回 0,否则返回 errno。
示例
#include <pthread.h>
#include <sched.h>
#include <stdio.h>
#include <unistd.h> // for getpid()
void* thread_function(void* arg) {
// 做一些工作
printf("Thread is running\n");
sleep(2);
return NULL;
}
int main() {
pthread_t thread;
pthread_attr_t attr;
struct sched_param param;
int policy;
// 初始化线程属性对象
pthread_attr_init(&attr);
// 先获取当前的调度策略(继承自父线程,通常是 SCHED_OTHER)
pthread_attr_getschedpolicy(&attr, &policy);
pthread_attr_getschedparam(&attr, ¶m);
printf("Default policy: %d, priority: %d\n", policy, param.sched_priority);
// 设置为使用 SCHED_RR 调度策略
policy = SCHED_RR;
pthread_attr_setschedpolicy(&attr, policy);
// 设置优先级,例如设置为 RR 策略的中间值
int min_prio = sched_get_priority_min(policy);
int max_prio = sched_get_priority_max(policy);
param.sched_priority = (min_prio + max_prio) / 2;
printf("Trying to set policy: %d, priority: %d\n", policy, param.sched_priority);
// 将新的调度策略和参数应用到属性对象
pthread_attr_setschedparam(&attr, ¶m);
// 非常重要:告诉系统我们将使用显式设置的调度属性,而不是继承的
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
// 创建线程,并应用这些属性
if (pthread_create(&thread, &attr, &thread_function, NULL) != 0) {
perror("pthread_create failed");
return 1;
}
// 等待线程结束
pthread_join(thread, NULL);
// 销毁属性对象
pthread_attr_destroy(&attr);
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
Default policy: 1, priority: 31
Trying to set policy: 2, priority: 31
Thread is running互斥锁
使用互斥锁实现线程同步时,系统会为共享资源添加一个称为互斥锁的标记,防止多个线程在同一时刻访问相同的共用资源。
互斥锁通常也被称为互斥量(mutex),它相当于一把锁,使用互斥锁可以保证以下 3 点:
- (1)原子性:如果在一个线程设置了一个互斥锁,那么在加锁与解锁之间的操作会被锁定为一个原子操作,这些操作要么全部完成,要么一个也不执行;
- (2)唯一性:如果为一个线程锁定了一个互斥锁,在解除锁定之前,没有其它线程可以锁定这个互斥量;
- (3)非繁忙等待:如果一个线程已经锁定了一个互斥锁,此后第二个线程试图锁定该互斥锁,则第二个线程会被挂起;直到第一个线程解除对互斥锁的锁定时,第二个线程才会被唤醒,同时锁定这个互斥锁。
使用互斥锁实现线程同步时主要包含四步:
- 初始化互斥锁
- 加锁
- 解锁
- 销毁锁
pthread_mutex_init
初始化互斥锁
/**
* 参数
* mutex 传出参数
* attr 代表互斥量的属性,通常传NULL,表示使用默认属性。
* 成功则返回0,否则返回errno
*/
int pthread_mutex_init(pthread_mutex_t *restrict mutex,
const pthread_mutexattr_t *restrict attr);关于参数 mutex 有以下几个要点:
- pthread_mutext_t 类型的本质是结构体,为简化理解,读者可将其视为整型;
- pthread_mutex_t 类型的变量 mutex 只有两种取值:0 和 1,
- 加锁操作可视为
mutex-1; - 解锁操作可视为
mutex+1;
- 加锁操作可视为
- 参数 mutex 之前的 restrict 是一个关键字,该关键字用于限制指针,其功能为告诉编译器,所有修改该指针指向内存中内容的操作,只能通过本指针完成。
errno 的常见取值为:
- EAGAIN 表示超出互斥锁递归锁定的最大次数,因此无法获取该互斥锁;
- EDEADLK 表示当前线程已有互斥锁,二次加锁失败。
通过 pthread_mutex_init()函数初始化互斥量又称为动态初始化,一般用于初始化局部变量,示例如下:
pthread_mutex_init(&mutex, NULL);此外互斥锁也可以直接使用宏进行初始化,示例如下:
pthead_mutex_t muetx = PTHREAD_MUTEX_INITIALIZER;此条语句与以上动态初始化示例语句功能相同。
pthread_mutex_lock
锁定指定互斥量
/**
* 参数mutex,表示待锁定的互斥量
* 调用成功则返回0,否则返回errno
*/
int pthread_mutex_lock(pthread_mutex_t *mutex);程序中调用函数 pthread_mutex_lock 后,直至程序中调用 pthread_mutex_unlock()函数之前,此间的代码均被上锁,即在同一时刻只能被一个线程执行。
pthread_mutex_trylock
/**
* 参数mutex同样表示待锁定的互斥量
* 若函数调用成功则返回0,否则返回errno
*/
int pthread_mutex_trylock(pthread_mutex_t *mutex);若需要使用的互斥锁正在被使用,调用 pthread_mutxe_lock()函数的线程会进入阻塞,但有些情况下,我们希望线程可以先去执行其它功能,此时需要使用非阻塞的互斥锁。
Linux 系统中提供了 pthread_mutex_trylock()函数,该函数的功能为尝试加锁,若锁正在被使用,不阻塞等待,而是直接返回并返回错误号。
其中常见的 errno 有两个,分别为:
- EBUSY:参数 mutex 指向的互斥锁已锁定;
- EAGAIN:超过互斥锁递归锁定的最大次数。
pthread_mutex_unlock
线程将会为指定互斥量解锁
/**
* 参数mutex表示待解锁的互斥量。
* 调用成功则返回0,否则返回errno
*/
int pthread_mutex_unlock(pthread_mutex_t *mutex);pthread_mutex_destroy
互斥锁也是系统中的一种资源,因此使用完毕后应将其释放
线程将为指定互斥量解锁
/**
* 参数mutex表示待销毁的互斥量。
* 调用成功则返回0,否则返回errno。
*/
int pthread_mutex_destroy(pthread_mutex_t *mutex);示例
两个线程输出文字:
- 线程 1: 预期输出 hello world
- 线程 2: 预期输出 HELLO WORLD
示例 1:未加锁
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
void *task1(void *arg)
{
printf("hello ");
sleep(1);
printf("world\n");
return NULL;
}
void *task2(void *arg)
{
printf("HELLO ");
sleep(1);
printf("WORLD\n");
return NULL;
}
int main(int argc, char const *argv[])
{
pthread_t task1_tid, task2_tid;
pthread_create(&task1_tid, NULL, task1, NULL);
pthread_create(&task2_tid, NULL, task2, NULL);
pthread_join(task1_tid, NULL);
pthread_join(task2_tid, NULL);
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
hello HELLO world
WORLD示例 2:加锁
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
pthread_mutex_t mutex;
void *task1(void *arg)
{
pthread_mutex_lock(&mutex); // 加锁
printf("hello ");
sleep(1);
printf("world\n");
pthread_mutex_unlock(&mutex); // 释放锁
return NULL;
}
void *task2(void *arg)
{
pthread_mutex_lock(&mutex); // 加锁
printf("HELLO ");
sleep(1);
printf("WORLD\n");
pthread_mutex_unlock(&mutex); // 释放锁
return NULL;
}
int main(int argc, char const *argv[])
{
pthread_t task1_tid, task2_tid;
// 初始化信号量
pthread_mutex_init(&mutex, NULL);
// 启动线程
pthread_create(&task1_tid, NULL, task1, NULL);
pthread_create(&task2_tid, NULL, task2, NULL);
// 等待线程结束
pthread_join(task1_tid, NULL);
pthread_join(task2_tid, NULL);
// 销毁信号量
pthread_mutex_destroy(&mutex);
return 0;
}运行结果
% gcc main.c -o main -l pthread && ./main
hello world
HELLO WORLD读写锁
pthread_rwlock_t
读写锁:
- 读线程可以同时获取读锁进行数据读取
- 写线程独占资源
pthread_rwlock_init
int pthread_rwlock_init(
pthread_rwlock_t * __restrict,
const pthread_rwlockattr_t * _Nullable __restrict
);pthread_rwlock_rdlock
int pthread_rwlock_rdlock(pthread_rwlock_t *);pthread_rwlock_tryrdlock
int pthread_rwlock_tryrdlock(pthread_rwlock_t *);pthread_rwlock_trywrlock
int pthread_rwlock_trywrlock(pthread_rwlock_t *);pthread_rwlock_wrlock
int pthread_rwlock_wrlock(pthread_rwlock_t *);pthread_rwlock_unlock
int pthread_rwlock_unlock(pthread_rwlock_t *);pthread_rwlock_destroy
int pthread_rwlock_destroy(pthread_rwlock_t * );示例
// thread_rwlock.c
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
// 初始化读写
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER;
int shared_lock = 0;
void *read_task(void *arg)
{
pthread_rwlock_rdlock(&rwlock);
printf("read shared_lock: %d\n", shared_lock);
sleep(3);
pthread_rwlock_unlock(&rwlock);
return NULL;
}
void *write_task(void *arg)
{
pthread_rwlock_wrlock(&rwlock);
shared_lock++;
printf("write shared_lock: %d\n", shared_lock);
sleep(3);
pthread_rwlock_unlock(&rwlock);
return NULL;
}
int main(int argc, char const *argv[])
{
pthread_t tid_read1;
pthread_t tid_read2;
pthread_t tid_write;
pthread_create(&tid_read1, NULL, read_task, NULL);
pthread_create(&tid_read2, NULL, read_task, NULL);
pthread_create(&tid_write, NULL, write_task, NULL);
pthread_join(tid_read1, NULL);
pthread_join(tid_read2, NULL);
pthread_join(tid_write, NULL);
pthread_rwlock_destroy(&rwlock);
return 0;
}执行结果
$ gcc thread_rwlock.c -o thread_rwlock && ./thread_rwlock
write shared_lock: 1
read shared_lock: 1
read shared_lock: 1条件变量
使用条件变量控制线程同步时,线程访问共享资源的前提,是程序中设置的条件变量得到满足。条件变量不会对共享资源加锁,但也会使线程阻塞,若线程不满足条件变量规定的条件,就会进入阻塞状态直到条件满足。
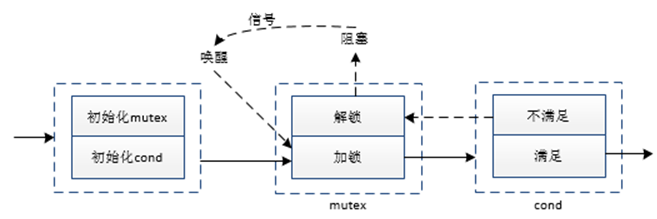
条件变量往往与互斥锁搭配使用,在线程需要访问共享资源时,会先绑定一个互斥锁,然后检测条件变量
- 若条件变量满足,线程就继续执行,并在资源访问完成后解开互斥锁;
- 若条件变量不满足,线程将解开互斥锁,进入阻塞状态,等待条件变量状况发生改变。
一般条件变量的状态由其它非阻塞态的线程改变,条件变量被满足则会唤醒阻塞中的进程,这些线程再次争夺互斥锁,对条件变量状况进行测试。
综上所述,条件变量的使用分为以下四个步骤:
- (1)初始化条件变量;
- (2)等待条件变量满足;
- (3)唤醒阻塞线程;
- (4)释放条件变量。
pthread_cond_init
初始化条件变量
/**
* 参数cond代表条件变量
* 参数attr代表条件变量的属性,通常设置为NULL,表示使用默认属性初始化条件变量
* - PTHREAD_PROCESS_PRIVATE,默认值,当前进程中的线程共用此条件变量;
* - PTHREAD_PROCESS_SHARED,表示多个进程间的线程共用条件变量。
*
* 成功则返回0,否则返回-1,并设置errno
*/
int pthread_cond_init(pthread_cond_t *restrict cond,
const pthread_condattr_t *restrict attr);除使用函数 pthread_cond_init()动态初始化条件变量外,也可以使用如下语句以静态方法初始化条件变量:
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;此种方式与将 attr 参数初始化为 NULL 的 pthread_cond_init()函数等效,但是不进行错误检查。
pthread_cond_wait
阻塞等待条件变量
/**
* 参数cond代表条件变量;
* 参数mutex代表与当前线程绑定的互斥锁。
*
* 成功则返回0,否则返回-1,并设置errno。
*/
int pthread_cond_wait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex);pthread_cond_wait()类似于互斥锁中的函数 pthread_mutex_lock(),但其功能更为丰富,它的工作机制如下:
(1)阻塞等待条件变量 cond 满足;
(2)解除已绑定的互斥锁(类似于 pthread_mutex_unlock());
(3)当线程被唤醒,pthread_cond_wait()函数返回,pthread_cond_wait()函数同时会解除线程阻塞,并使线程重新申请绑定互斥锁。
以上工作机制中,前两条为一个原子操作;需要注意的最后一条,最后一条机制表明:当线程被唤醒后,仍需重新绑定互斥锁。这是因为,“线程被唤醒”及“绑定互斥锁”并不是一个原子操作,条件变量满足后也许会有多个处于运行态的线程出现,并竞争互斥锁,极有可能在线程 B 绑定互斥锁之前,线程 A 已经执行了以下操作:
获取互斥锁——修改条件变量——解除互斥锁
此时线程 B 即便获取到互斥锁,条件变量仍不满足,线程 B 应继续阻塞等待。综上所述,再次检测条件变量的状况是极有必要的。
pthread_cond_timedwait
使线程阻塞等待条件变量
该函数可以指定线程的阻塞时长,若等待超时,该函数便会返回
/**
* 参数cond代表条件变量,
* 参数mutex代表互斥锁,
* 参数abstime代表绝对时间,用于设置等待时长,该参数是一个传入参数
*/
int pthread_cond_timedwait(
pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex,
const struct timespec *restrict abstime
);struct timespec 定义如下
struct timespec {
time_t tv_sec; //秒
long tv_nsec; //纳秒
}pthread_cond_signal
在条件变量满足之后,以信号的形式唤醒阻塞在该条件变量的一个线程。处于阻塞状态中的线程的唤醒顺序由调度策略决定
/**
* 参数cond代表条件变量
* 成功则返回0,否则返回-1,并设置errno。
*/
int pthread_cond_signal(pthread_cond_t *cond);pthread_cond_broadcast
唤醒阻塞在指定条件变量的线程,该函数会以广播的形式,唤醒阻塞在该条件变量上的所有线程。
/**
* 参数cond代表条件变量
* 成功则返回0,否则返回-1,并设置errno。
*/
int pthread_cond_broadcast(pthread_cond_t *cond);示例
生产者-消费者模型,两个线程,消费者必须等待消费者生产数据后才能消费
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <time.h>
// 初始化互斥锁
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
// 初始化条件变量
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
int value = 0; // 标志位,表示是否有产品
void *producer(void *arg)
{
while (1)
{
pthread_mutex_lock(&mutex); // 加锁
while (value)
{
pthread_cond_wait(&cond, &mutex); // 等待条件变量
}
sleep(1); // 模拟生产过程
value = random() % 100 + 1; // 生产完毕,设置标志位
printf("producer: %d\n", value);
pthread_mutex_unlock(&mutex); // 释放锁
pthread_cond_signal(&cond); // 通知消费者
}
return NULL;
}
void *comsumer(void *arg)
{
while (1)
{
pthread_mutex_lock(&mutex); // 加锁
while (!value)
{
pthread_cond_wait(&cond, &mutex); // 等待条件变量
}
printf("comsumer: %d\n", value);
sleep(1); // 模拟消费过程
value = 0; // 消费完毕,重置标志位
pthread_mutex_unlock(&mutex); // 释放锁
pthread_cond_signal(&cond); // 通知生产者
}
return NULL;
}
int main(int argc, char const *argv[])
{
pthread_t producer_tid, comsumer_tid;
srand(time(NULL));
// 启动线程
pthread_create(&producer_tid, NULL, producer, NULL);
pthread_create(&comsumer_tid, NULL, comsumer, NULL);
// 等待线程结束
pthread_join(producer_tid, NULL);
pthread_join(comsumer_tid, NULL);
// 销毁
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
return 0;
}% gcc main.c -o main -l pthread && ./main
producer: 84
comsumer: 84
producer: 87
comsumer: 87
producer: 78
comsumer: 78
producer: 16
comsumer: 16示例:死锁
解决办法:按照统一的先后顺序获取锁
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
// 初始化2把互斥锁
pthread_mutex_t mutex_a = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t mutex_b = PTHREAD_MUTEX_INITIALIZER;
// 先加a锁再加b锁
void *task_a(void *arg)
{
pthread_mutex_lock(&mutex_a);
printf("task_a mutex_a lock\n");
sleep(1);
pthread_mutex_lock(&mutex_b);
printf("task_a do\n");
pthread_mutex_unlock(&mutex_b);
pthread_mutex_unlock(&mutex_a);
return NULL;
}
// 先加b锁再加a锁
void *task_b(void *arg)
{
pthread_mutex_lock(&mutex_b);
printf("task_a mutex_b lock\n");
sleep(1);
pthread_mutex_lock(&mutex_a);
printf("task_b do\n");
pthread_mutex_unlock(&mutex_a);
pthread_mutex_unlock(&mutex_b);
return NULL;
}
int main(int argc, char const *argv[])
{
pthread_t tid_a;
pthread_t tid_b;
pthread_create(&tid_a, NULL, task_a, NULL);
pthread_create(&tid_b, NULL, task_b, NULL);
pthread_join(tid_a, NULL);
pthread_join(tid_b, NULL);
return 0;
}执行结果
$ gcc thread_lock.c -o thread_lock && ./thread_lock
task_a mutex_a lock
task_a mutex_b lock